
 产品:232
产品:232
 联系我们
联系我们

ABB机器人简单写字教程
1、在UG中创建450X300X300底座,在上表面写字

2、安装机器人、加载机器人系统、导入底座
底座定位


3、创建工件坐标

4、创建空路径,改名为main

5、示教pHome点
1)设置机器人运动参数

2)机械人回到机械原点,在工件坐标wobj0下示教指令,修改目标点名称为pHome。


6、创建自动路径
1)设置工件坐标为Workobject_1,设置机器人运动指令参数


2)创建自动路径,选取曲线,完成自动路径
注意起笔点的选择



7、调整目标点的方位
1)查看目标处工具

2)在本地坐标下绕Z轴旋转-90度


3)用Shift键一起选取其余点,对准目标点方向

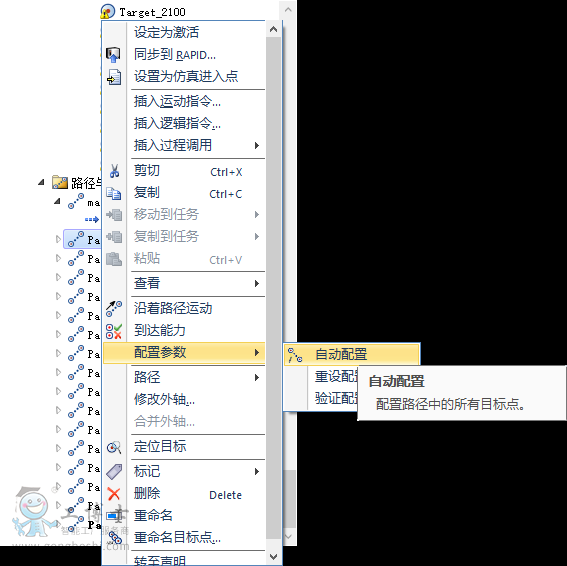
8、配置轴参数

9、将后面所有路径拖入到main路径中(调用子程序)

10、将工作站修改同步到RAPID中

11、仿真运行轨迹,查看是否有轴配置错误。
若仿真停止在某处,则需要将机器人回机械原点,示教指令,然后手动示教进入点,示教指令。
12、修改RAPID程序,在每段轨迹开始和结束处用offs指令分别设置接入点和退出点。

这么简单的写字你会了吗?
更多详情请点击:ABB机器人
- 下一篇:机器人走进汽车造车工厂——ABB机器人
- 上一篇:机器人的保养流程——ABB机器人