
 产品:232
产品:232
 联系我们
联系我们

ABB机器人自动测量程序分享
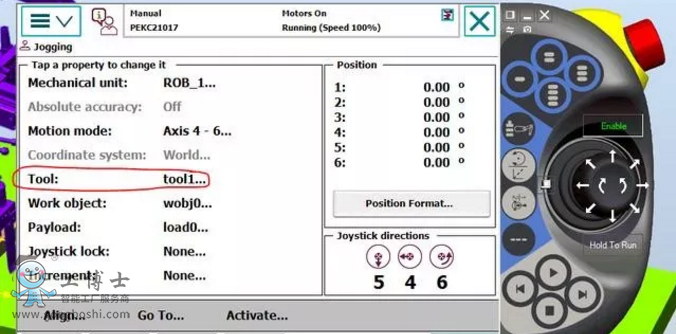
作为机器人四大家族之一的ABB机器人以其**的技术和良好的质量闻名于世,在ABB机器人中提供了大量的可选项功能以及例行程序帮助工程师减少工作量,提升工作效率,今天要介绍的就是ABB机器人自带测量Tool Center Point(工具中心点)和Payload(负载)的例行程序。首先在将机器人抓手装在机器人第六轴上,先点击进行手动操作界面即Jogging中,在Tool一栏中选择要测量的工具坐标系Tool1,注意此步很重要,如果没有正确选择要测量的Tool之后的操作步骤会出现错误。再点击进入程序界面,在Debug中我们可以看到Call routine选项,没错,就是这个选项。
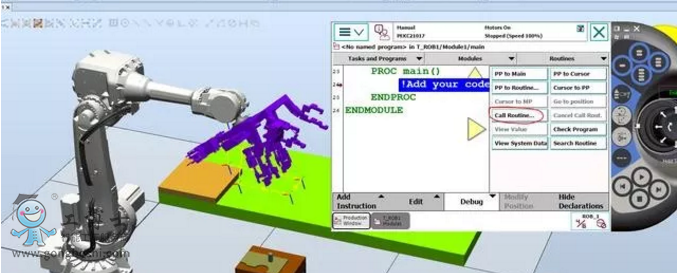
点击Call routine,示教器界面会显示多个ABB机器人自带的例行程序,今天我们要选择的是LoadIdentify。
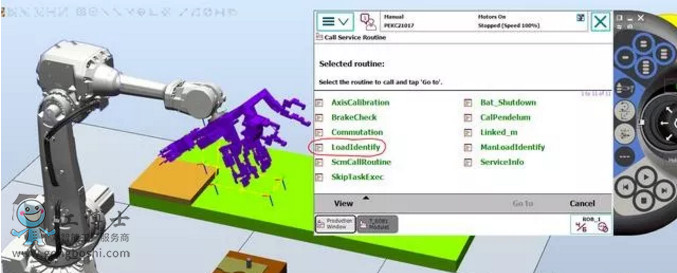
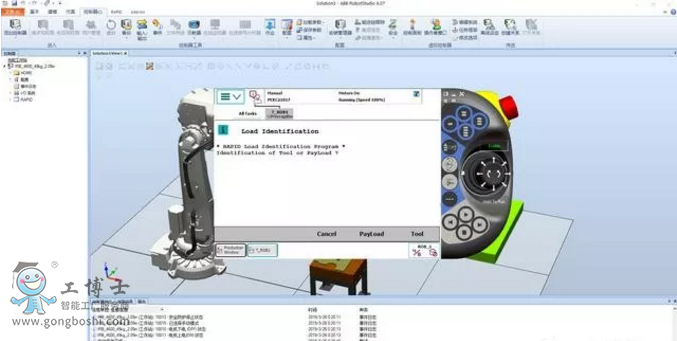
点击选择LoadIdentify选项,出现LoadIdentify程序界面。
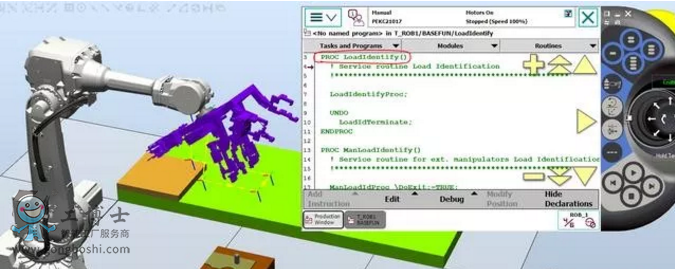
出现这个界面之后直接点击示教器连续运行按钮运行该程序,出现新画面,点击OK,按照提示一步一步执行。

点击之后会出现另外一个画面,让我们选择是进行TCP设定还是Payload的设定。如果我们要进行TCP设定则选择Tool,进行Payload设定则选择Payload,在这里我们以Tool为例进行讲解。
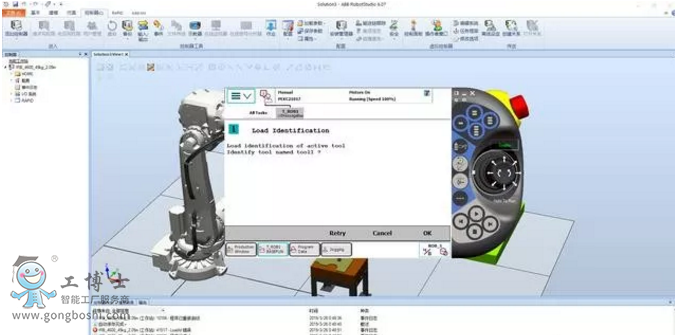
点击Tool出现如下画面,告诉我们要正确安装抓手到机器人第六轴上,直接选择OK,继续向下执行程序。出现新的画面,询问是否对Tool1进行设定,选择OK继续执行。
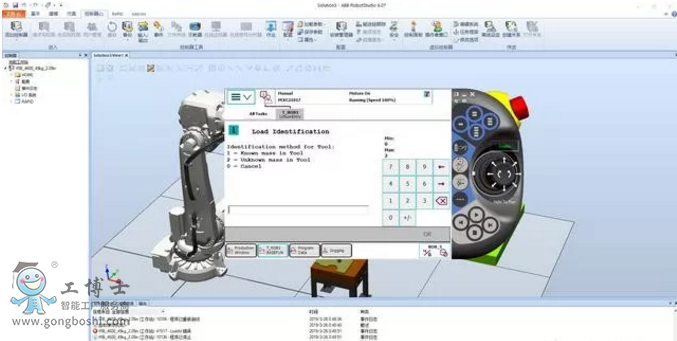
点击之后出现新的画面,询问Tool1的中应该设定第六轴抓手的重量,假定不知道抓手重量,填写2。
之后出现新的画面,询问测量角度。因为abb机器人测量过程中要不断的变化角度来正确计算Tool1中的重量、重心等参数,在这里我们选择系统的建议值+90。

之后出现新的画面,让我们操作机器人将第四轴和第五轴移动至零点。按照要求将第四和第五轴移动至零点即可。
之后会出现新的画面,系统提示将执行缓慢执行程序,点击Move。
之后会出现新的画面,系统提示将执行缓慢执行程序,点击Move。
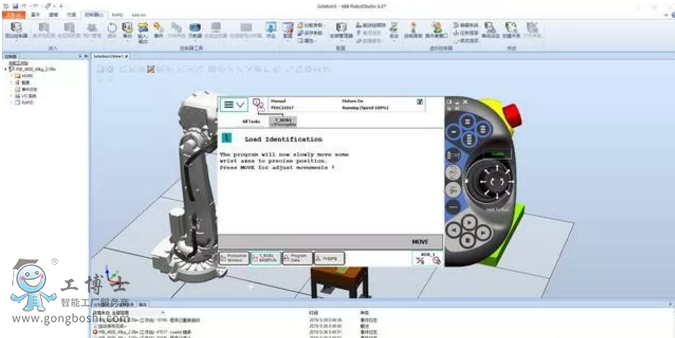
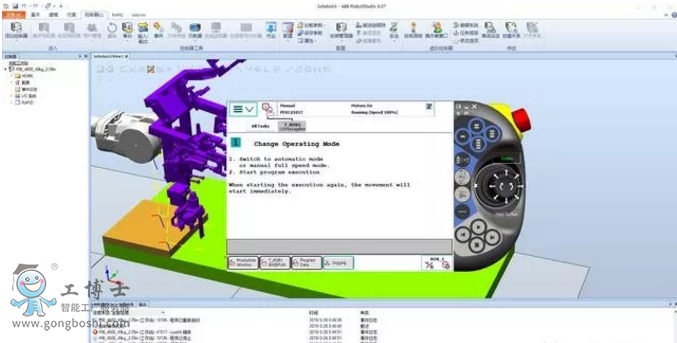
之后就是机器人自动缓慢移动的过程了,此处不再赘述。机器人缓慢移动完成之后会出现新的提示画面,提示我们将机器人切换成自动模式或者手动全速模式,按照系统要求进行操作即可。
切换成自动模式后在程序界面再次点击连续运行按钮,剩下的交给ABB来干吧。运行程序结束之后系统自动提示切换成手动模式。切换成手动模式点击OK,之后在示教器界面即可显示Tool1中的重量重心等参数。因为使用的是ABB机器人的仿真软件,机器人第六轴抓手并没有实际的重量,所以用仿真软件并不会出现Tool1的测量值。
更多机器人资讯请点击:http://abbrobotics-repairs.gongboshi.com/
联系电话:18616560100
更多机器人资讯请点击:http://abbrobotics-repairs.gongboshi.com/
联系电话:18616560100