
 产品:232
产品:232
 联系我们
联系我们

ABB机器人的速度在应用中我们应当如何应用
在ABB机器人应用场合中我们都需要控制机器人的速度,比如焊接、搬运、码垛等等。有的是为了控制机器人定位精度,有的是为了控制机器人不过载,有的是为了控制机器人的工作效率。那此时我们控制机器人的速度就尤为重要。那我们来看看ABB机器人中控制机器人速度的指令吧!
Override:控制ABB器人的运行速率,以百分比表示。
Max:规定了ABB机器人的*大运行速度。
注意:
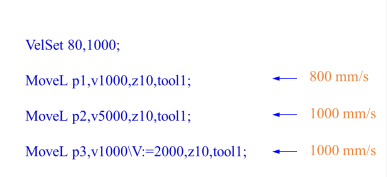
对机器人运行速度进行限制,ABB机器人运动指令中均带有运行速度,在执行运动速度控制指令 VelSet 后,实际运行速度为运动指令规定的运行速度乘以机器人运速率,并且不超过机器人*大运行速度,系统默认值为 VelSet 100, 5000;下面我们以例子给大家说明。
实例1:
VelSet 50,800;
*设置速度指令
MoveL p1,v1000,z10,tool1; 500mm/s
*机器人以500mm/s(50%*1000)的速度移至P1位置点
MoveL p2,v1000V:=2000,z10,tool1; 800mm/s
*机器人以500mm/s(50%*1000)-----1000mm/s(50%*1000)的速度作参考,*终以800mm/s的速度移至P2位置点
MoveL p3,v1000T:=5,z10,tool1; 10S
*机器人到达P3位置点,需要10S的时间(T代表限定时间,正常按100%速度走,需要5S时间,现以50%速度走,需要10S时间)
实例2:
了解更多资讯请点击:abb机器人
联系电话:18616560100