
 产品:232
产品:232
 联系我们
联系我们

abb机器人的配置系统输入/出应该如何去操作
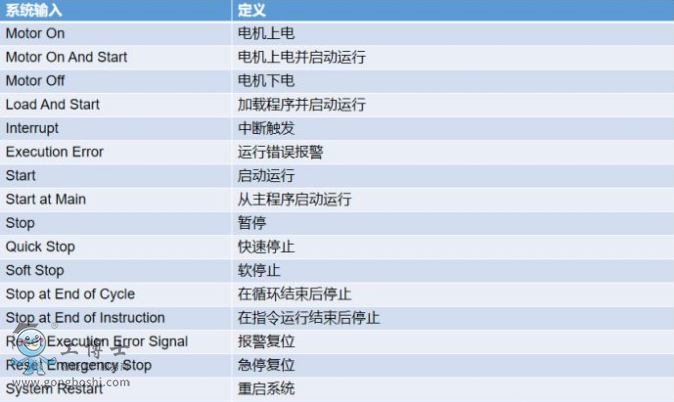
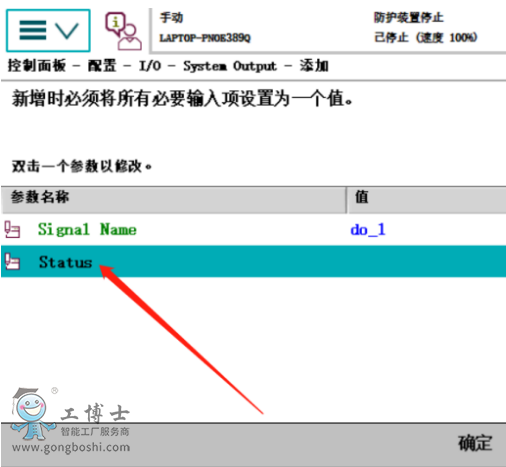
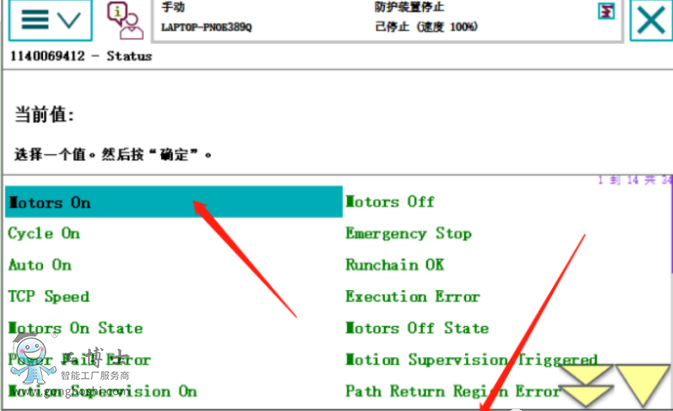
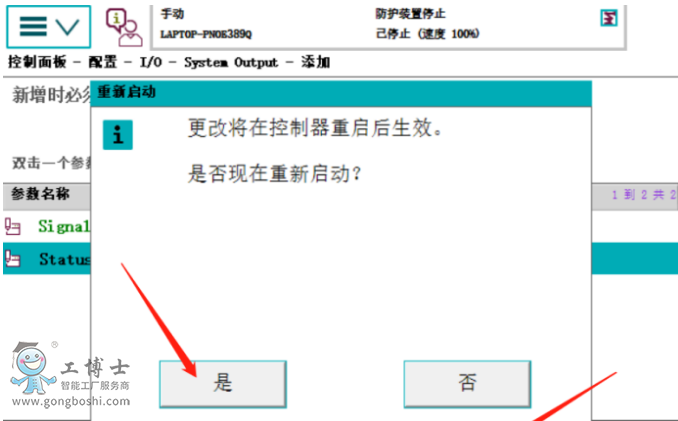
通用输入/输出可以达到让机器人控制外部设备&接收外部设备信号的效果,但大多场景下我们还需要将机器人当前状态传输给上位设备(通常为PLC和工控机)并由上位设备控制abb机器人部分动作,从而实现远程控制。此时就需要用到系统输入/输出,abb机器人常用的系统输入&输出如下表所示:

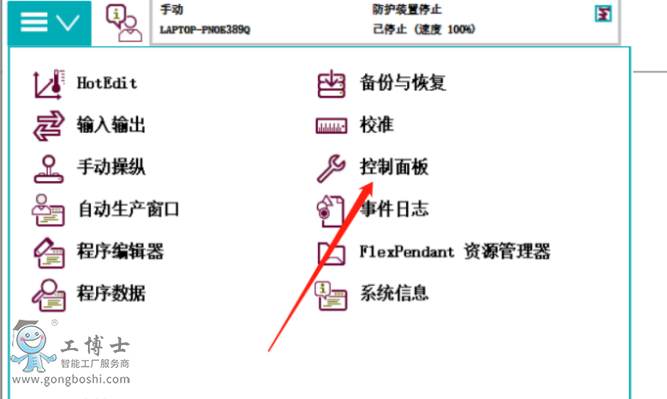
1.点击“abb机器人主菜单”,选择“控制面板”


更多机器人资讯请点击:http://abbrobotics-repairs.gongboshi.com/
联系电话:18616560100